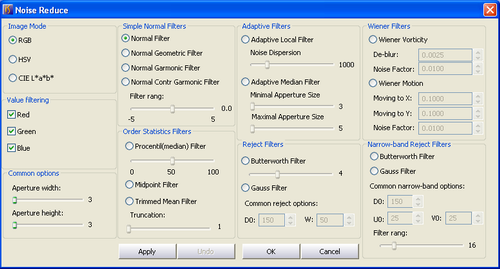
Although there is no different variations of photo manipulations, Noise Reduce allows to make operations with image using color systems RGB, HSV and LAB.
For example, when you select RGB mode, Simple Middle Filter and Filter meanings: Red, Blue - it means that values of Red or Blue in each pixel will have middle
value according to the Red and Blue components of the nearby pixels.
Usually, filters are working by this rule: a window is selected (usually 3x3,5x5 pixels) named aperture. This window has a 1 pixel step beginning from left top
and ending at right bottom. As a rule, on each iteration a middle pixel of aperture is progressed according to the values of all pixels of this window which are
named the locality of this pixel. As a rule, increasing of aperture size leads to more effective noise reduction and on the other side to more blurred border.
Simple Middle Filters are based on calculations of arithmetical mean, geometrical mean of aperture and etc.
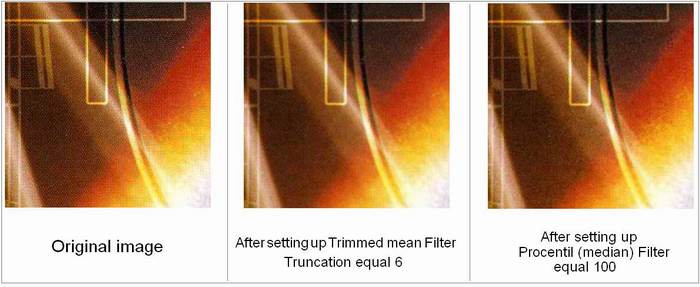
Procentil (median) Filter. Median filter is one of the prevalent filter. It`s action concludes in substitution`s meaning at median locality. Median Filter appliance
gives good results for images distorted with impulse noise and other kinds of accidental noises. It`s about weakly blurred the image (unlike Middle Filters).
In other turn, Median Filter is a private case of the Procentil Filter (In the case with median, Procentil equals 50). The other private case are Maximal Filters
(Procentil equals 100) and Minimum Filters (Procentil equals 0). The first is effective for selecting bright points and decreasing the black noise, the second - for
selecting black points and for decreasing the white noise.
Example of Median Filter:

Midpoint Filter is a middle valued of maximum and minimum. It is good for such accidentally distributed noises as Gauss Filter or equable.
Trimmed mean filter is analog of Median Filter but it doesn`t look out n/2 points of the maximum brightness and n/2 points of minimum brightness.
Main feature of the Adaptive Filters concludes that it doesn`t set with definite formula and change it`s internals in dependence of the picture placement where aperture is.
Adaptive Local Filter is an adaptive middle filter, but it gives notably loss blur. It can be used for Gauss noise neutralization.
Adaptive median filter tries to save pixel`s values in image regions which distorted with not impulse noise because of it could change aperture size in dependence
of pixel locality. Altogether it gives also less blur and more exactness.
Reject Filters (Including Narrow-band reject filters) are working at frequency region. A common order of actions is look like this: a Fourier-spectrum calculates by image.
Then some manipulations are made with Fourier-spectrum which either loose or increase values of some frequencies. After that an invert reorganization of Fourier is made with
Fourier-spectrum and you have got filtered picture. All filters in frequency region do not hang on the aperture size.
Strictly speaking Reject Gauss Filter and Reject Butterworth Filter are deleting or loose frequencies at circle region around beginning of coordinates of Fourier. Parameter "W"
is responsible for the wideness of the circle and "D0" is responsible for the circle radius passing through the center of the circle. Filter could be applied for deleting periodic
noises and decide effectively noises problem which appear when scanning a gloss surface, especially with lower resolution. Worth of such noise reduction is that image blur
practically absent.
Narrow-band Reject Filters are effective if the noise`s direction is known. For example, if the noise is a discontinuous parallel lines. U0, V0 - coordinates of this point at left
bottom quarter of the image. If you take such symmetrical image, it will be positioned on the noise direction.
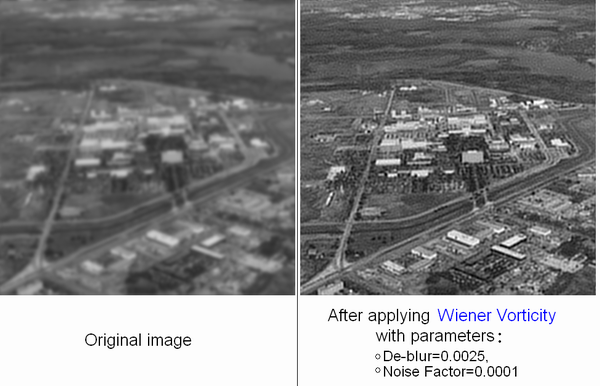
Wiener Filters could be interesting primarily to those who explore filtration. Wiener Filters intend for image deblur. Speciality of Wiener Filtration is in it`s ability to produced
by different formulas. Filtration in Falco Image Studio realized by two formulas: turbulent formula and motion formula. Turbulent Formula normally makes sharpness problem
and selecting the simple blur regions decided. Leastways it becomes more easy-reading and likable for an eye.
Example of Wiener Vorticity with parameters: De-blur=0.0025, Noise Factor=0.0001: